

Finoo.id – √ Apa itu Motor Stepper? Konstruksi, Jenis dan Cara Kerjanya. Motor stepper adalah salah satu jenis motor listrik yang memiliki keunggulan unik dalam mengubah sinyal listrik menjadi gerakan mekanik dengan presisi tinggi. Motor ini sering digunakan dalam berbagai aplikasi, mulai dari printer, CNC (Computer Numerical Control), hingga robotika, karena kemampuannya untuk mengontrol posisi, kecepatan, dan arah putaran secara akurat. Artikel ini akan membahas secara mendalam tentang apa itu motor stepper, konstruksi dasarnya, berbagai jenis yang tersedia, serta cara kerja yang membuatnya menjadi komponen penting dalam dunia teknologi modern.
Dalam era teknologi yang semakin berkembang, motor stepper menjadi salah satu elemen kunci dalam perangkat yang membutuhkan kendali presisi. Dibandingkan dengan motor listrik biasa, motor stepper mampu memberikan gerakan bertahap yang sangat terukur, membuatnya ideal untuk aplikasi yang membutuhkan kontrol gerak yang presisi. Melalui artikel ini, kalian akan mempelajari pengertian motor stepper, bagaimana konstruksinya dirancang, jenis-jenisnya yang beragam, serta mekanisme kerjanya yang memungkinkan motor ini bekerja dengan efisien dan kalianl.
Pengertian Motor Stepper
Motor stepper, seperti yang terlihat dari namanya, adalah jenis motor listrik yang beroperasi dengan prinsip langkah (step) diskrit. Berbeda dengan motor DC konvensional yang bekerja dengan komutasi melalui komponen sikat (brush), motor stepper menerima input berupa pulsa-pulsa digital yang dikendalikan oleh sistem pengendali eksternal. Setiap pulsa digital yang diterima oleh motor akan menggerakkan motor dengan langkah tertentu, yang memungkinkan motor ini untuk bergerak secara terkontrol dan presisi.
Prinsip kerja motor stepper berhubungan erat dengan konstruksi kumparan yang disusun menjadi beberapa kelompok yang disebut fase. Setiap fase diberi energi secara bergantian dan berurutan, yang menyebabkan rotor motor bergerak selangkah demi selangkah. Hal ini berbeda dengan motor DC yang bergerak secara kontinu. Motor stepper mengubah sinyal listrik yang masuk menjadi gerakan mekanis yang terdistribusi dalam langkah-langkah teratur, memberikan kontrol yang sangat presisi atas posisi dan gerakan. kalian bisa mengendalikan motor stepper menggunakan perangkat mikrokontroler atau rangkaian digital untuk menentukan jumlah langkah dan arah gerakan.
Meski torsi yang dihasilkan oleh motor stepper tidak sebesar motor DC, motor ini memiliki keunggulan dalam hal presisi gerakan. Motor stepper mampu menggerakkan beban dengan tingkat akurasi tinggi pada setiap langkahnya, menjadikannya ideal untuk aplikasi yang membutuhkan kontrol posisi yang tepat, seperti dalam printer 3D atau robotika. Kecepatan gerak motor stepper biasanya diukur dalam satuan langkah per detik (step per second), yang menggambarkan berapa banyak langkah yang dapat dicapai motor dalam waktu satu detik. Dengan kontrol yang tepat, motor stepper memungkinkan pengoperasian yang halus dan terperinci.
Konstruksi Motor Stepper
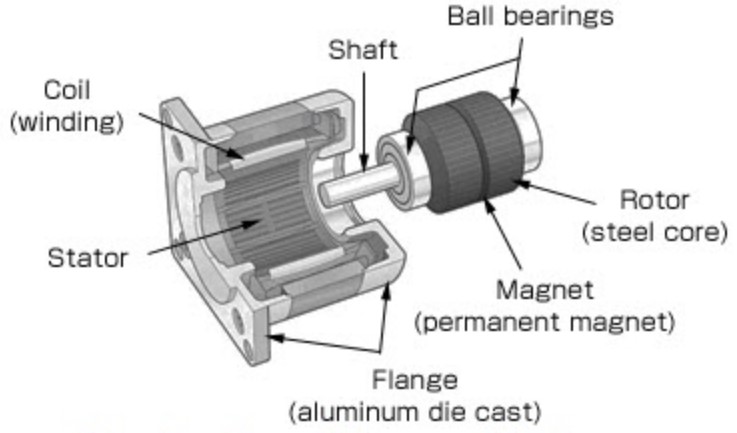
Secara umum, motor stepper memiliki konstruksi yang mirip dengan motor listrik pada umumnya, yaitu terdiri dari rotor dan stator. Namun, perbedaan utama motor stepper terletak pada cara putarannya yang tidak melibatkan sikat, melainkan mengkalianlkan pulsa-pulsa diskrit yang diberikan pada kumparan motor.
Pada motor stepper, stator terbuat dari material logam yang dililitkan dengan kawat tembaga di sekelilingnya. Berbeda dengan motor DC konvensional, belitan pada stator motor stepper tidak melingkar secara penuh di seluruh bagian stator, tetapi dililitkan pada gigi-gigi stator secara individu. Desain ini menjadikannya lebih mirip dengan motor brushless, di mana belitan stator ini terhubung ke sumber input yang memberikan pulsa digital untuk menggerakkan motor.
Rotor pada motor stepper biasanya terbuat dari besi lunak atau batang magnet. Rotor ini akan merespon medan magnet yang dihasilkan oleh belitan stator dan bergerak sesuai dengan sudut langkah yang telah ditentukan. Salah satu keunggulan motor stepper adalah kemampuannya untuk mengatur posisi rotor secara akurat tanpa membutuhkan mekanisme umpan balik (feedback), yang membuatnya ideal untuk aplikasi yang memerlukan pengendalian posisi yang tepat.
Jenis Motor Stepper
Motor stepper terbagi dalam beberapa kategori. Berdasarkan struktur rotor dan statornya, motor stepper umumnya terdiri dari tiga jenis utama, yaitu:
1. Variable Reluctance (VR)
Motor stepper tipe VR merupakan jenis yang paling sederhana. Motor ini terdiri dari rotor berbahan besi lunak yang memiliki beberapa gerigi dan dikelilingi oleh belitan stator.
Stator pada motor VR terdiri dari beberapa belitan yang langsung terhubung dengan input, dan belitan ini menentukan sudut langkah (step) motor. Rotasi motor terjadi ketika gerigi rotor tertarik oleh kutub stator akibat pulsa digital yang diberikan. Pulsa digital ini membawa daya listrik yang menghasilkan medan elektromagnetik pada kumparan stator, yang kemudian menggerakkan rotor.
Magnet pada motor stepper tipe VR lebih kecil dan ringan dibandingkan dengan jenis permanen magnet, sehingga motor ini dapat bergerak lebih cepat. Semakin kecil jarak (gap) antara rotor dan gigi stator pada motor VR, semakin lemah gaya magnet yang dihasilkan.
2. Permanen Magnet (PM)
Motor stepper tipe Permanen Magnet (PM) menggunakan magnet permanen pada rotornya dan bekerja berdasarkan gaya tarik atau tolak antara rotor dan stator elektromagnet. Berbeda dengan tipe Variable Reluctance, motor tipe PM tidak memiliki gerigi pada rotornya.
Sebagai gantinya, motor stepper PM menggunakan magnet dengan kutub utara dan selatan yang bergantian, dengan garis magnet yang sejajar dengan poros rotor. Kutub magnet pada rotor ini menghasilkan fluks magnet yang lebih intens, sehingga menghasilkan torsi yang lebih tinggi dibandingkan dengan motor tipe VR.
3. Stepper Hybrid
Motor stepper Hybrid adalah kombinasi dari dua jenis stepper sebelumnya, yaitu tipe Variable Reluctance dan Permanen Magnet. Penggabungan kedua tipe ini bertujuan untuk memberikan daya maksimum dalam bentuk yang lebih kompak.
Karena merupakan hasil penggabungan dua jenis, motor stepper Hybrid biasanya memiliki harga yang lebih tinggi dibandingkan kedua jenis lainnya. Namun, motor ini menggabungkan keunggulan terbaik dari kedua tipe, menghasilkan kinerja yang lebih baik dalam hal resolusi, torsi, dan kecepatan. Rotor pada stepper Hybrid memiliki multi-gerigi seperti tipe VR dan dilengkapi dengan magnet konsentrik aksial di sekitar porosnya.
Motor stepper Hybrid mampu menghasilkan sudut langkah yang lebih kecil, mulai dari 3.6° hingga 0.9° per langkah. Ini berarti diperlukan antara 100 hingga 400 langkah untuk setiap putaran penuh motor.
Berdasarkan sistem lilitan pada statornya, motor stepper dibagi menjadi dua jenis utama, yaitu:
1. Stepper Unipolar
Motor stepper jenis ini memiliki dua lilitan dengan cabang tengah (center tap). Cabang tengah dari masing-masing lilitan bisa disatukan atau terpisah, tergantung pada spesifikasi yang tercantum dalam datasheet motor.
Umumnya, motor stepper unipolar memiliki cabang tengah yang disatukan, sehingga motor ini memiliki lima input. Cabang tengah pada stepper ini dapat dihubungkan ke ground atau VCC, sesuai dengan petunjuk yang terdapat dalam datasheet motor dan driver yang digunakan.
2. Stepper Bipolar
Motor stepper bipolar tidak dilengkapi dengan cabang tengah (center tap). Kelebihan utama dari motor ini adalah torsi yang lebih besar jika dibandingkan dengan motor unipolar dengan ukuran yang sama.
Motor stepper bipolar hanya memiliki empat input. Namun, pengendalian motor ini lebih rumit dibandingkan dengan motor unipolar.
Untuk mengontrol motor stepper bipolar, diperlukan sinyal digital yang berubah-ubah antara positif dan negatif pada setiap lilitannya. Hal ini bertujuan untuk menciptakan fluktuasi magnetik yang terus berubah, sehingga rotor dapat bergerak sesuai dengan sudut langkah yang diinginkan.
Cara Kerja Motor Stepper
Pada dasarnya, cara kerja motor stepper bervariasi, tergantung pada konstruksi rotor dan stator serta sistem lilitan pada statornya. Meskipun demikian, setiap motor stepper digerakkan oleh pulsa digital yang berubah secara berkala.
Kecepatan sinyal pulsa digital, atau lebih tepatnya frekuensi sinyal, mempengaruhi kecepatan putaran motor. Semakin tinggi frekuensi sinyal, semakin cepat pula RPM motor stepper.
Sinyal digital ini juga digunakan untuk menentukan posisi rotor pada motor stepper. Misalnya, jika motor stepper memiliki sudut langkah 1.8°, maka untuk satu putaran penuh diperlukan 200 langkah. Dengan demikian, untuk setengah putaran, motor memerlukan 100 langkah, dan untuk satu setengah putaran, diperlukan 300 langkah. Inilah sebabnya motor stepper sering digunakan dalam aplikasi seperti printer 3D dan mesin CNC Engraving.
Sinyal digital yang diberikan pada rotor menghasilkan medan magnetik yang berinteraksi dengan rotor pada motor stepper. Interaksi ini menyebabkan motor bergerak sesuai dengan sudut langkah yang ditentukan dan tetap berada pada posisi tersebut hingga menerima sinyal digital berikutnya.
Metode Pengendalian Motor Stepper
Motor stepper mengubah sinyal elektronik menjadi gerakan mekanis setiap kali pulsa digital diberikan pada input. Setiap sinyal yang diterima menggerakkan motor dalam langkah-langkah teratur.
Seperti yang telah dijelaskan sebelumnya, jika spesifikasi motor stepper menyebutkan sudut langkah 1.8°, maka untuk satu putaran penuh diperlukan 360/1.8 = 200 langkah.
Untuk menggerakkan setiap langkah pada motor stepper, terdapat beberapa metode yang dapat diterapkan, di antaranya adalah:
1. Full Step
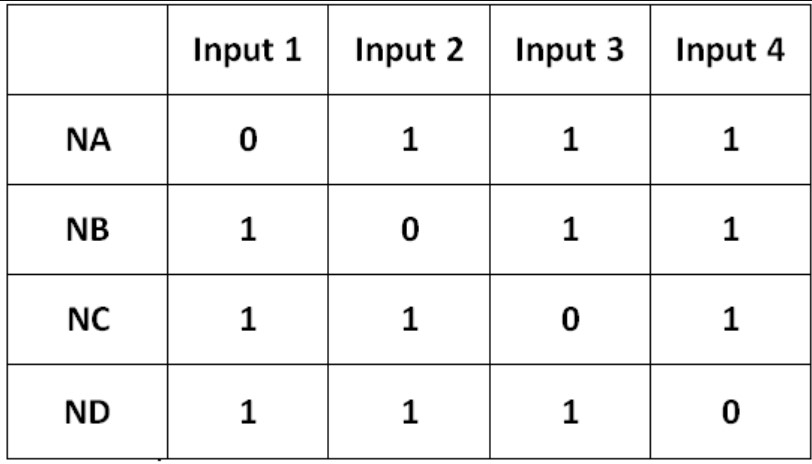
Pada metode full step, motor stepper beroperasi dengan mengaktifkan satu fase pada satu waktu. Hanya satu belitan yang diberi energi pada setiap langkah, namun untuk meningkatkan torsi, dua belitan bisa diaktifkan secara bersamaan.
Metode full step menghasilkan gerakan motor yang lebih kasar jika dibandingkan dengan metode half step, karena langkah yang dihasilkan lebih besar. Namun, keunggulan dari metode ini adalah konsumsi daya yang paling rendah pada driver, membuatnya lebih efisien dalam aplikasi yang tidak membutuhkan presisi tinggi. Meskipun torsi yang dihasilkan tidak sebesar metode lainnya, full step masih digunakan dalam banyak aplikasi karena kesederhanaannya dan kebutuhan daya yang rendah. Contoh sinyal input pada metode full step memperlihatkan perubahan energi yang terjadi pada satu belitan atau dua belitan secara berurutan, yang dapat dilihat pada gambar berikut.
2. Half Step
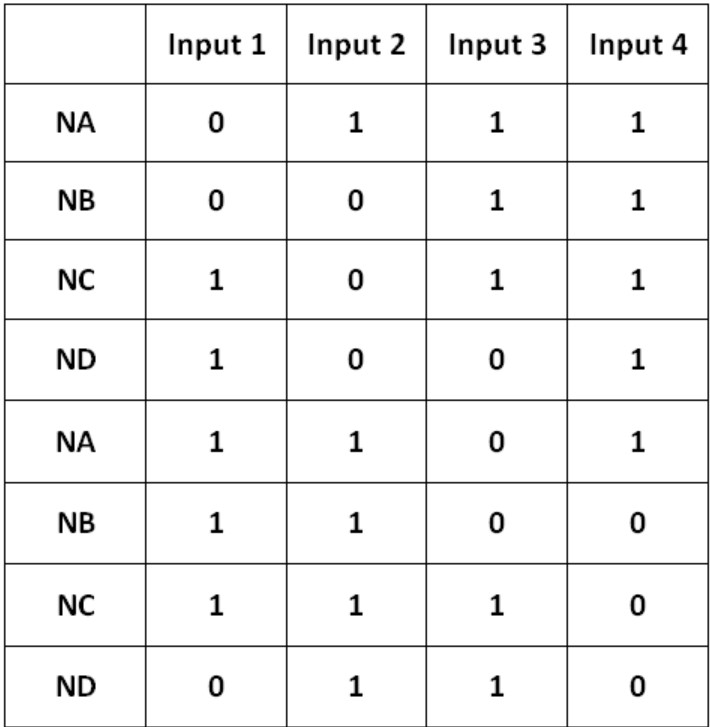
Metode half step menggunakan kombinasi belitan tunggal dan gkalian untuk pengoperasiannya. Dalam metode ini, motor stepper bergerak menggunakan satu fase seperti pada full step, tetapi juga mengaktifkan dua fase secara bersamaan, menghasilkan langkah yang lebih kecil dibandingkan dengan full step.
Dengan langkah yang lebih kecil ini, motor dapat berputar lebih halus, menghasilkan gerakan yang lebih presisi dan lebih stabil. Keuntungan dari metode half step adalah putaran yang lebih mulus, namun torsi yang dihasilkan mungkin sedikit lebih rendah dibandingkan full step. Ini membuat metode half step ideal untuk aplikasi yang membutuhkan keseimbangan antara kecepatan dan presisi, seperti dalam mesin pencetak 3D atau alat pengukuran akurat. Contoh sinyal input pada half step memperlihatkan pola pengaktifan belitan yang lebih teratur dan halus, yang dapat dilihat pada gambar berikut.
BACA JUGA :
- Pengertian Motor Servo: Fungsi Dan Cara Kerjanya Lengkap
- √ Mengenal Motor BLDC (Dinamo Brushless)? Cara Kerja & Konstruksinya
- Jenis-Jenis Motor DC Beserta Cara Kerjanya Secara Lengkap
- √ Apa Itu Motor Dahlander? Cara Kerja dan Keunggulannya
Penutup
Motor stepper adalah komponen yang sangat penting dalam dunia teknologi modern, terutama dalam aplikasi yang memerlukan kontrol posisi dan kecepatan yang presisi, seperti printer 3D, robotika, dan mesin CNC.
Dengan berbagai jenis dan metode pengoperasiannya, motor stepper menawarkan fleksibilitas tinggi dalam berbagai kebutuhan teknis, dari torsi yang besar hingga kehalusan gerakan yang lebih tinggi.
Meskipun memiliki beberapa kekurangan seperti torsi yang lebih rendah pada jenis tertentu, motor stepper tetap menjadi pilihan utama karena kemampuannya untuk memberikan kontrol yang tepat dan kalianl tanpa memerlukan mekanisme umpan balik yang kompleks.
Memahami cara kerja dan konstruksi motor stepper, serta jenis-jenis yang tersedia, memungkinkan kita untuk memilih motor yang paling sesuai dengan aplikasi tertentu, mengoptimalkan efisiensi dan kinerja sistem.
Seiring dengan perkembangan teknologi, penggunaan motor stepper diperkirakan akan semakin meluas, menjadikannya semakin relevan di berbagai sektor industri.
Demikianlah artikel finoo.id yang membahas tentang √ Apa itu Motor Stepper? Konstruksi, Jenis dan Cara Kerjanya. Semoga artikel kami dapat bermafaat dan terimakasih telah membaca artikel ini.



{kind=link}