

Finoo.id – √ Skema Pengatur Kecepatan Motor DC dengan PWM yang Tepat. Motor DC banyak digunakan dalam berbagai aplikasi industri maupun sehari-hari karena kemampuannya untuk memberikan kontrol kecepatan yang presisi. Salah satu metode paling efektif untuk mengatur kecepatan motor DC adalah dengan menggunakan modulasi lebar pulsa atau Pulse Width Modulation (PWM).
Teknik ini tidak hanya sederhana tetapi juga efisien dalam menjaga kinerja motor tetap optimal sambil menghemat daya. Artikel ini akan membahas secara mendalam skema pengatur kecepatan motor DC menggunakan PWM yang tepat untuk memastikan performa terbaik pada berbagai kebutuhan.
Pemilihan metode PWM sebagai pengatur kecepatan motor DC didasarkan pada keunggulannya dalam menghasilkan kontrol yang halus dan responsif. Dengan mengatur durasi pulsa yang diberikan ke motor, pengguna dapat mengubah kecepatan putaran tanpa mengurangi efisiensi daya. Dalam artikel ini, akan dijelaskan prinsip kerja PWM, komponen utama yang dibutuhkan, serta skema rangkaian yang praktis dan mudah diterapkan, sehingga kalian dapat memahami cara mengaplikasikan teknologi ini pada berbagai proyek.
Mengenal Motor DC
Motor DC (Direct Current) adalah perangkat elektromekanis yang berfungsi mengubah energi listrik menjadi energi kinetik atau gerakan mekanis. Motor ini menjadi salah satu komponen utama dalam berbagai aplikasi karena kemampuannya memberikan kontrol yang presisi dan fleksibilitas yang tinggi. Motor DC memiliki dua terminal utama, yaitu power dan ground, yang berfungsi sebagai jalur masuk dan keluar arus listrik. Agar dapat beroperasi, motor ini memerlukan sumber tegangan DC yang stabil, seperti yang dihasilkan oleh baterai atau adaptor listrik.
Keunggulan motor DC terletak pada kemampuannya untuk menghasilkan putaran dengan kecepatan tertentu yang diukur dalam satuan RPM (Revolutions Per Minute). Kecepatan dan arah putaran motor dapat dikendalikan dengan mudah melalui pengaturan tegangan atau polaritas arus listrik yang diberikan. Motor ini dapat berputar searah jarum jam (clockwise) atau berlawanan arah jarum jam (counterclockwise) sesuai kebutuhan, sehingga sangat cocok untuk berbagai perangkat elektronik, seperti kipas pendingin pada komputer, robotika, mainan elektronik, hingga sistem otomasi. Kekalianlan dan fleksibilitas motor DC menjadikannya solusi ideal dalam aplikasi yang membutuhkan gerakan presisi dan efisiensi energi.
Prinsip Kerja Motor DC
Motor listrik DC terdiri dari dua bagian utama, yaitu Stator dan Rotor. Stator adalah bagian yang statis atau tidak bergerak, yang terdiri dari rangka atau kerangka dan kumparan medan magnet. Sementara itu, Rotor adalah bagian yang bergerak atau berputar, yang terdiri dari kumparan jangkar. Kedua bagian utama ini kemudian dilengkapi dengan komponen penting lainnya, seperti Yoke (kerangka magnet), Poles (kutub motor), Field Winding (kumparan medan magnet), Armature Winding (kumparan jangkar), Commutator (komutator), dan Brushes (sikat arang).
Prinsip kerja motor listrik DC didasarkan pada fenomena elektromagnetik. Ketika arus listrik dialirkan ke kumparan, kumparan akan menghasilkan kutub magnetik. Permukaan kumparan yang memiliki sifat kutub utara akan tertarik ke arah kutub selatan magnet tetap, begitu pula sebaliknya. Namun, ketika kutub magnet kumparan sejajar dengan kutub magnet permanen (utara dengan selatan atau selatan dengan utara), gerakan kumparan akan berhenti karena gaya tarik-menarik mencapai keseimbangan.
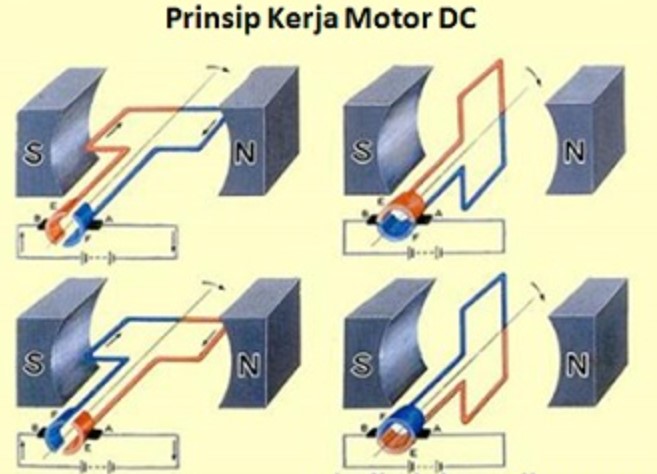
Agar kumparan terus bergerak, arus listrik di kumparan harus dibalik tepat saat kutub kumparan sejajar dengan kutub magnet. Dengan membalik arus, kutub magnet pada kumparan juga berubah—kutub utara menjadi selatan, dan sebaliknya. Perubahan ini menyebabkan gaya tolak-menolak antara kutub magnet yang sejenis, sehingga kumparan kembali bergerak. Proses ini terus berulang selama arus listrik mengalir ke kumparan, menciptakan gerakan putar yang kontinu. Siklus ini hanya berhenti jika aliran listrik pada kumparan dihentikan.
Skema Pengatur Kecepatan Motor DC
Rangkaian pengatur kecepatan motor DC dirancang untuk mengontrol kecepatan putaran motor dengan memanfaatkan metode PWM (Pulse Width Modulation). Teknologi ini menghasilkan denyut pulsa digital yang dapat digunakan untuk mengatur besarnya daya yang diterima motor, sehingga kecepatan putarannya dapat diatur sesuai kebutuhan. Sebelum membahas detail skema rangkaian, penting untuk memahami prinsip dasar motor DC dan metode PWM itu sendiri.
Motor DC adalah perangkat elektromekanik yang mengubah energi listrik menjadi energi mekanik berupa gerakan. Secara umum, motor DC terdiri dari dua bagian utama, yaitu Stator dan Rotor. Stator adalah bagian statis yang terdiri dari dua magnet dengan kutub berlawanan, sedangkan Rotor adalah bagian yang berputar akibat interaksi medan magnet antara kumparan rotor dan medan magnet stator. Saat motor DC berputar, ia menghasilkan torsi (torque) dengan kecepatan yang biasanya dinyatakan dalam satuan RPM (revolutions per minute).
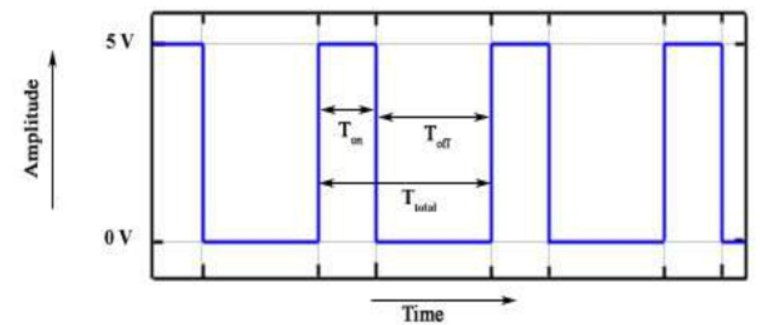
Metode PWM (Pulse Width Modulation) merupakan teknik untuk mengatur lebar pulsa sinyal digital dengan perioda yang tetap dan frekuensi konstan. Lebar pulsa ini dinyatakan dalam persen (%), di mana semakin besar persentase PWM, semakin lama pulsa berada pada kondisi High, dan sebaliknya. Selain digunakan untuk mengontrol kecepatan motor DC, metode PWM juga memiliki berbagai aplikasi lain, seperti pengaturan intensitas cahaya lampu DC, telekomunikasi, pengontrolan daya atau tegangan ke beban, regulator tegangan, efek audio, serta penguatan sinyal. Metode ini menawarkan efisiensi tinggi dan fleksibilitas, menjadikannya pilihan yang ideal untuk berbagai keperluan kontrol dan pengaturan daya.
Skematik Rangkaian
Berikut adalah skema rangkaian digital untuk mengatur putaran motor DC menggunakan metode PWM:
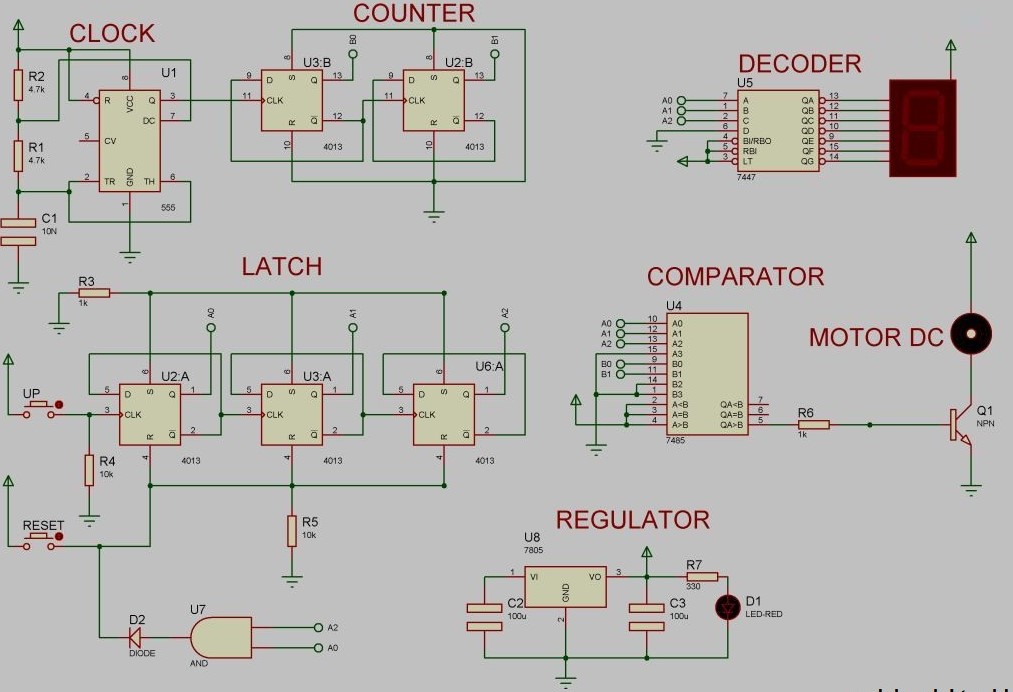
Prinsip Kerja Rangkaian
Rangkaian ini terdiri dari beberapa rangkaian dasar yang digabungkan, seperti rangkaian pembangkit clock, counter 2-bit, latch, dan komparator.
Pertama, rangkaian clock menggunakan IC NE555 menghasilkan pulsa kontinu. Frekuensi dan duty cycle dari pulsa ini ditentukan oleh nilai komponen C1, R1, dan R2. Rumus untuk menghitung frekuensi output dari rangkaian clock adalah:
F = 1,44 / {(R1 + 2R2) * C1}
Pada Skema diatas diketahui Nilai R1 = R2 = 4.7K ohm, C1= 100nF. Maka Frekuensinya adalah :
F = 1,44 / {(4700 + 2.4700)*0.0000001}
F= 1,44 / {(141000)*0.00000001}
F=1,44 / 0.0141
F=1021Hz atau 1KHz
Rumus duty Cyclenya adalah :
D = ((R1 + R2 )* 100) / (R1 + 2R2 )
D= { ((R1 +R2)*100) / (R1+2R2) }
D= { ((4700 +4700)*100) / (4700+9400) }
D= 66.6%
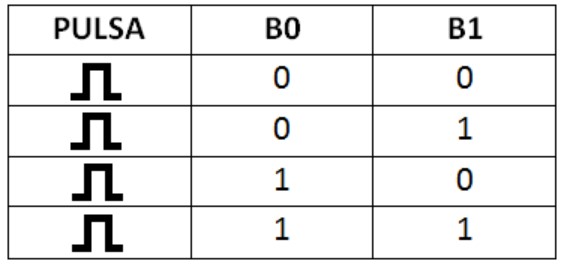
Setelah pulsa clock dihasilkan, rangkaian pencacah (counter) 2-bit yang menggunakan IC TTL 4013 memanfaatkan pulsa ini. Hasil pencacahan dibaca pada pin B0 dan B1 sesuai dengan tabel yang ditampilkan di bawah.
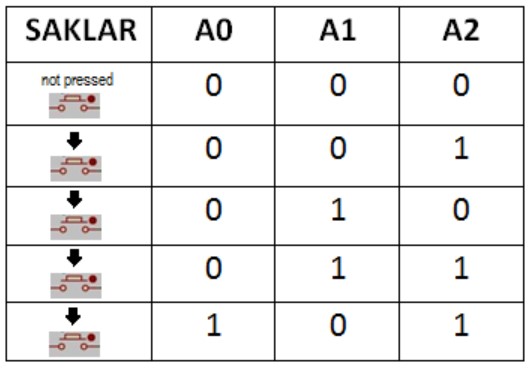
Rangkaian penahan (latch), yang juga dibangun menggunakan IC 4013, berfungsi untuk menahan nilai cacahan hingga sinyal pulsa berikutnya diberikan. Saklar UP digunakan untuk memberikan logika masukan pada latch, sehingga rangkaian mencacah naik satu tingkat setiap kali saklar ditekan.
Setiap cacahan menghasilkan keluaran pada pin A0, A1, dan A2 dalam bentuk kombinasi biner dari 000 hingga 101. Setelah saklar UP ditekan empat kali, rangkaian IC AND secara otomatis mereset cacahan ke nilai awal (000). Hasil cacahan secara detail dapat dilihat pada tabel berikut.
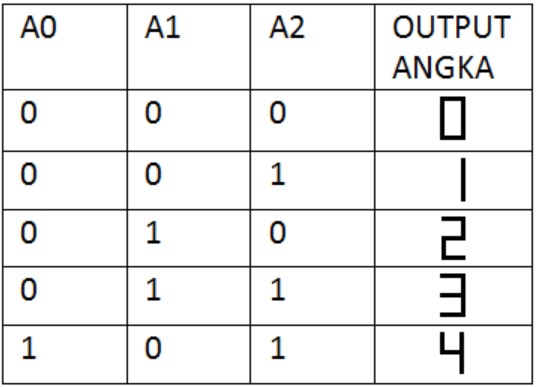
Rangkaian dekoder yang menggunakan IC 7447 memiliki fungsi untuk mengonversi input bilangan biner menjadi tampilan angka pada seven-segment display. Angka yang muncul pada layar akan mengikuti data dari pin A0, A1, dan A2 sesuai dengan tabel yang disediakan.
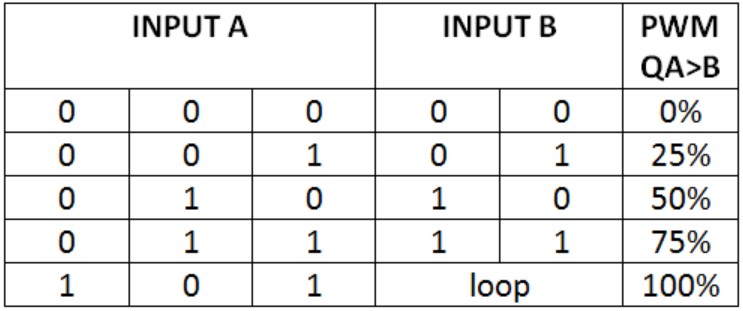
Hasil cacahan dari rangkaian counter dan rangkaian latch dibandingkan menggunakan rangkaian komparator berbasis IC 7485. IC ini membandingkan data pada pin A0, A1, dan A2 dengan data dari B0 dan B1. Jika kondisi QA > B terpenuhi, pin 5 dari IC 7485 akan menghasilkan logika high.
Pada kondisi awal, ketika saklar UP belum ditekan, nilai A adalah 000. Nilai ini dibandingkan dengan nilai counter B0 dan B1 yang terus mencacah secara berulang (00, 01, 10, dan 11). Dalam kondisi ini, karena nilai A tidak pernah lebih besar dari B, output pada pin 5 tetap low (0), yang berarti PWM memiliki nilai 0%. Namun, jika saklar UP ditekan satu kali, nilai A menjadi 001. Saat dibandingkan dengan nilai B, ini menghasilkan PWM sebesar 25%. Untuk memahami lebih lanjut, perhatikan tabel berikut.
BACA JUGA :
- Jenis-Jenis Motor DC Beserta Cara Kerjanya Secara Lengkap
- Pengertian Motor DC Beserta Fungsi & Prinsip Kerjanya
- √ Mengenal Motor BLDC (Dinamo Brushless)? Cara Kerja & Konstruksinya
- √ Aplikasi Motor Stepper dan Kelebihanya Secara Lengkap
Penutup
Dalam artikel ini, telah dibahas secara rinci mengenai skema pengatur kecepatan motor DC menggunakan metode PWM yang tepat. Dengan pemahaman tentang prinsip dasar motor DC dan cara kerja PWM, kita dapat mengontrol kecepatan motor dengan efisien dan presisi.
Penggunaan rangkaian sederhana yang melibatkan clock generator, counter, latch, dan komparator memungkinkan kontrol yang mudah, baik untuk aplikasi industri maupun perangkat elektronik lainnya.
Teknik PWM tidak hanya mengoptimalkan pengaturan kecepatan motor, tetapi juga memberikan solusi hemat energi dan fleksibilitas tinggi untuk berbagai keperluan.
Dengan semakin berkembangnya teknologi, pemahaman mengenai pengaturan kecepatan motor DC ini semakin penting, terutama dalam dunia otomatisasi dan robotika.
Semoga artikel finoo.id ini dapat memberikan wawasan dan manfaat bagi kalian yang tertarik untuk mendalami topik pengaturan kecepatan motor DC.



{kind=link}